Biography
I am a Research Assistant at Bundeswehr University Munich. I am working on computer vision and deep generative networks for single cell analysis.
I obtained my Master and Bachelor degree in Mechatronics Engineering from Yildiz Techinal University (YTU) under supervision of Prof. Huseyin Uvet. For 6 years, I am member of Advanced System and Innovation Laboratories in YTU as Student Assistant (2017-2020), Research Assistant (2020-2022) and now Engineering Manager (2022-now). Also, I was the Research Engineer at ASELSAN for 6 months in 2020.
Download my resumé .
- Microrobotics
- Computer Vision
- Deep Learning
-
MSc in Mechatronics Engineering, 2022
Yildiz Technical University
-
BSc in Mechatronics Engineering, 2020
Yildiz Technical University
Featured Publications
Projects


Experience
- Software Engineering
- Developing deep generative networks.
- Single cell image analysis.
- Leading the artificial intelligence projects in sports and medicine.
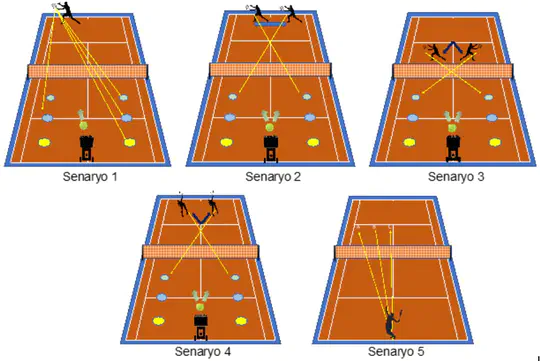
- Project writing and developing an AI-assisted virtual sport coach. Supported by The Scientific and Technological Research Council Of Turkey (TUBITAK) - 1001 - 121E683
- Project Budget: 768.000 TL (appx: 52.000 USD)
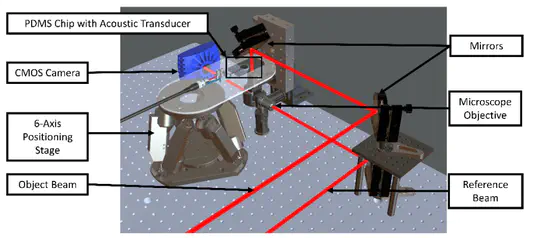
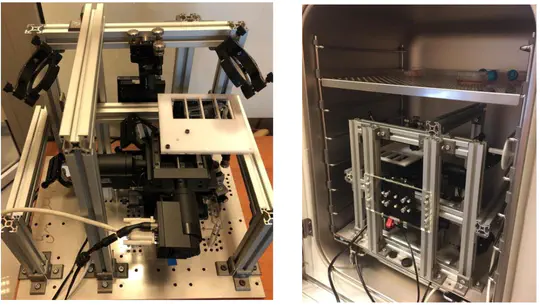
- TUBITAK 1003 (Project no: 116E743): Measuring the mechanical cell stiffness of circulating tumor cells using acoustic signals and digital holography.
- Biomedical imaging with deep learning applications.
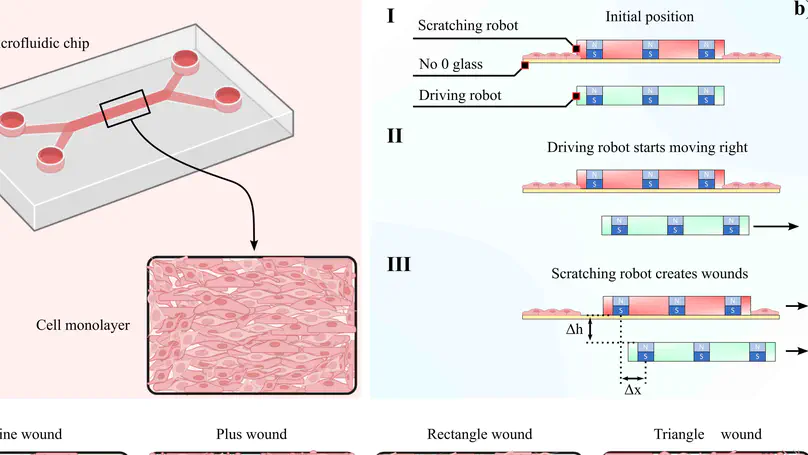
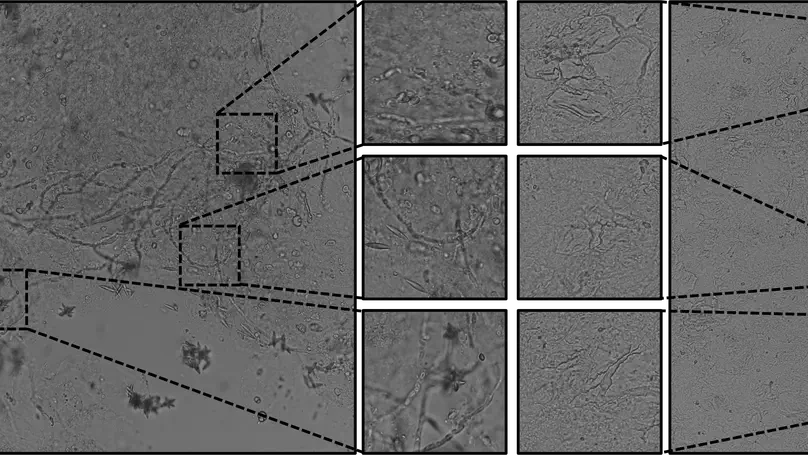
- Microrobotic wound scratching platform (Master Thesis).
- Touch panel design, its wireless communications and improving an efficiency of electronic devices.
- Mouse-touchscreen emulator device for wireless connection to smart boards.
- TUBITAK 1001 (Project no: 113E584): Micro robotic arm design, production, and contactless manipulation with visual feedback.
- TUBITAK 1003 (Project no: 116E743): Measuring the refractive index of circulating tumor cells under electric field using digital holography.
Publications
Journals
-
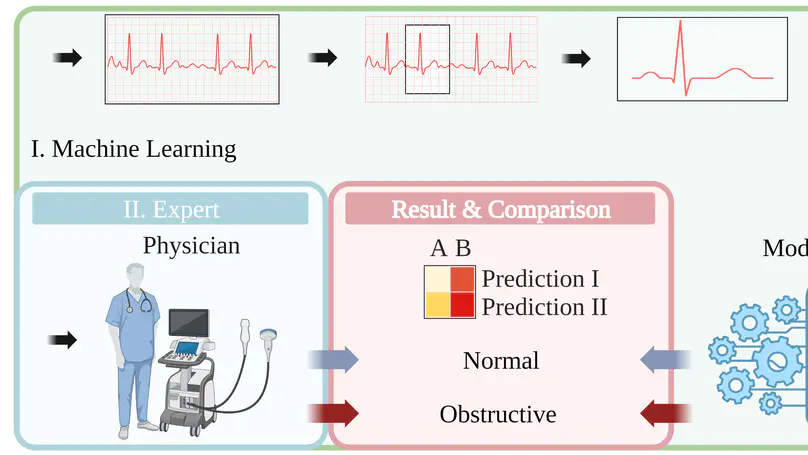
A. Yilmaz, M. I. Hayiroglu, Serkan Salturk, Levent Pay, A. A. Demircali, R. Varol, O. Tezen, S. Eren, T. Cetin, A. I. Tekkesin, and H. Uvet. Machine learning approach on high risk treadmill exercise test to predict obstructive coronary artery disease by using p, qrs, and t waves’ features. Accepted, Current Problems in Cardiology, 2022.
-
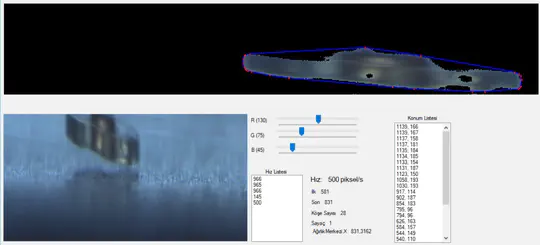
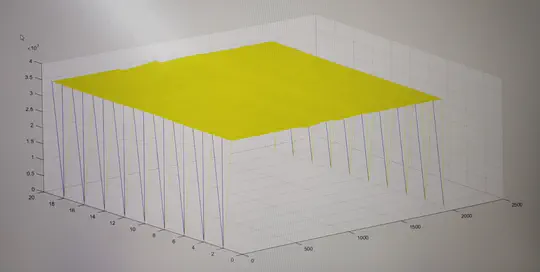
R. Varol, Z. Karavelioglu, S. Omeroglu, G. Aydemir, A. Karadag, H. E. Meco, G. C. Kocal, A. Yilmaz, M. E. Oruc, G. B. Esmer, Y. Basbinar, and H. Uvet. Holographic cell stiffness mapping using acoustic stimulation. Accepted, Nature Communications, 2022.
Conference Proceedings
-
H. Demirci, A. Yilmaz, M. E. Oruc. Production of Thermal Imprint Apparatus for Micro, and Nano Molding. 5. GTU Graduate Research Symposium, 2021.
-
A. A. Demircali, T. Vatansever, E. Saruhan, A. Yilmaz, B. A. Yildiz, B. Guner, M. Kesen, K. Erkan, and H. Uvet. Increasing Longitudinal Forces of Microrobot Using with Diamagnetic Levitation. TOK2019, 2019.
-
A. A. Demircali, T. Vatansever, E. Saruhan, A. Yilmaz, B. A. Yildiz, B. Guner, M. Kesen, K. Erkan, and H. Uvet. A Highly Accurate Microrobot Position Control in Liquid Laminar Flow. TOK2019, 2019.
-
A. A. Demircali, T. Vatansever, E. Saruhan, A. Yilmaz, H. Gules, and H. Uvet. Increasing Longitudinal Forces of Microrobot Using with Diamagnetic Levitation. INSI2019, 2019.
-
A. A. Demircali, T. Vatansever, E. Saruhan, A. Yilmaz, H. Gules, and H. Uvet. Motion Control of Micro-robot in Laminar Flow. INSI2019, 2019.
-
A. A. Demircali, A. Yilmaz, H. Uvet. Microrobot Orientation Control with Laser, and Visual Feedback. pages 65–69. TORK2018, ISTANBUL, TURKEY, 2018. [Best Paper Award]
Preprints
Patent and Review Service
-
National Patent, An Electro-Holographic Microscopy System that can Separate Cells and Microorganisms According to the Refractive Index, (No:2020/19536), 12/2020.
-
Ad hoc reviewer for International Journal of Imaging Systems and Technology, 2020.
Contact
- a.rahim.yilmaz@gmail.com
- Bundeswehr University Munich, Neubiberg, Munich, Germany 85579